
NVIDIA Isaac Sim正成為機器人與智慧製造領域首選的實體模擬平台。其開源、多平台擴充、深度AI整合等優勢,為研發團隊帶來高保真度物理/視覺模擬、合成資料自動化與大規模測試能力。高度相容ROS、支援主流模型和AI演算法訓練。2024年重大升級強化了大量模擬和雲端部署,推動智慧機器人從設計到真實落地的全面革新。
一、Isaac Sim是什麼?新聞視角下的AI模擬平台
Isaac Sim是NVIDIA基於Omniverse平台推出的高傳真的立體機器人模擬環境,具備開源、開放生態、多物理引擎和AI整合等頂級能力。透過整合主流標準(USD、ROS/2、PhysX、RTX等),平台在學術界與工業界廣獲關注。
- 程式碼可客製化,適合深度研發
- 物理與視覺高度還原真實世界
- 一站式合成數據,協助AI快速標示訓練
二、核心功能亮點
| 功能模組 | 作用概述 | 領先技術 | 與AI關聯 |
|---|---|---|---|
| 物理仿真 | 機器人與環境高度交互 | PhysX剛體/軟體,馬達驅動 | sim2real,端到端AI |
| 感測器仿真 | 相機、雷達等真實數據 | RTX渲染,感測器擾動建模 | 感知模型、資料自動化標註 |
| 合成數據 | 批量視覺/深度資料生成 | Omniverse Replicator | AI資料集擴充 |
| 機器人框架集成 | 支援ROS/2、URDF等 | 雙向訊息橋 | 易遷移挑戰現實部署 |
| AI訓練介面 | 強化學習與動作仿真 | Isaac Lab拓展,全面API | 一站式演算法開發驗證 |

高保真物理與視覺仿真由強大的PhysX和RTX加速渲染驅動,摩擦、碰撞等實體細節全面還原。例如,多關節機器人在複雜場景下的表現極為真實。
合成數據自動化透過Omniverse Replicator,一鍵產生RGB、深度、點雲及全標籤數據,大幅提升AI模型的數據效率。
| 資料類型 | 支持情況 | 應用場景 |
|---|---|---|
| RGB影像 | 高精度標註、光照多樣化 | 視覺檢測/AI識別 |
| 深度圖 | 真值對齊多鏡頭 | SLAM、分割、3D重建 |
| 光達點雲 | 多線/擾動/運動模糊 | 導航、自動駕駛 |
| 分割標籤 | 像素/實例多層分隔 | 監督/自動學習 |
深度整合機器人開發流程
支援現有ROS/2、URDF、MJCF等主流機器人設計標準。透過插件實現模擬-現實雙向一致,流程靈活,溝通高效,既可用於實驗室科研,也能快速部署到產業級專案。
三、架構與技術優勢解析
1. 元件與資料流程
| 組件 | 功能簡介 | 生態對接 |
|---|---|---|
| OpenUSD | 3D世界描述主流標準 | Pixar/Adobe/Apple等 |
| PhysX物理引擎 | 剛體、軟體、摩擦、驅動 | 工程、工業、遊戲等 |
| Replicator | 合成資料批量生成 | AI、視覺、無人駕駛 |
| ROS2/Isaac ROS | 機器人通訊訊息同步 | 科學研究、產業多領域 |
| RTX渲染 | 即時高保真光追 | CV/AI仿真真實感 |
2. 三大主流操作模式
| 模式 | 入口 | 典型用戶 | 優勢 |
|---|---|---|---|
| GUI介面 | 桌面類別App | 教育、驗證工程師 | 可視化拖曳、快速建模 |
| EXT程式設計 | Python/C++模組 | 研發、開發者 | 動態擴展,熱重載,客製化性強 |
| HEADLESS腳本 | Jupyter/自動化 | 演算法、數據生成 | 批量仿真,自動處理 |
四、產業應用與落地場景
1. 智慧移動機器人
AMR、智慧工廠、倉儲機器人等,利用Isaac Sim實現複雜場景下的路徑規劃、避障和數據跟踪,高效驗證與快速部署成為行業標竿。
- 工廠佈局下多輪避障演算法迭代,精準可復現
- 大規模模擬驗證縮短開發與測試週期
2. 自動駕駛與智慧感知
城市交通/室內環境多元仿真,可輸出多模態感測器數據,協助AI感知、偵測、定位演算法安全加速落地。
3. 人形機器人&機械手臂
多自由度機械動作模擬、強化學習訓練、力學驗證全覆蓋。適用於人形機器人步態優化、群體機器人協作、工業操控等。

4. 教育培訓與創新教學
大學普及型自動化與機器人實踐平台,豐富資產庫與直覺操作體系,為創新人才培育提供強力支撐。
五、isaac sim工作流程
1. 機器人模型導入
| 格式 | 特點 | 推薦場景 |
|---|---|---|
| URDF | ROS/2標準,結構規範 | 移動機器人/機械手臂 |
| MJCF | 適合高自由度複雜設計 | 強化學習、物理研究 |
| OnShape | CAD直接建模導入 | 結構創新、工程設計 |
2. 場景&感測器配置
基於GUI或腳本拖曳,快速搭建三維場景,靈活添加障礙物、角色、各類相機雷射雷達等。
3. 演算法即時存取運行
支援將本地AI/感知/控制演算法「即插即用」接取仿真,即時觀測並調整AI決策鏈路效果。
4. 批量測試與資料歸檔
雲端或本地多GPU大規模模擬實驗,自動歸檔所有場景與運行結果,為不斷優化AI及硬體提供強數據支撐。
六、與AI研發全流程的深度適配
Isaac Sim已成為AI機器人開發的“模擬優先基地”:從自動化產生大量合成訓練數據,到深度強化學習平台,再到軟硬體一體閉環,大幅降低研發門檻和部署風險。
- 大模型資料加持:Sim結合Cosmos/GR00T等AI模型擴充資料多樣性與泛化力
- 全環節安全閉環:端到端「仿真-實體」驗證,保障工業/無人駕駛安全標準
- 主流AI框架直通:無需複雜適配,演算法靈活驗證、一鍵遷移落地
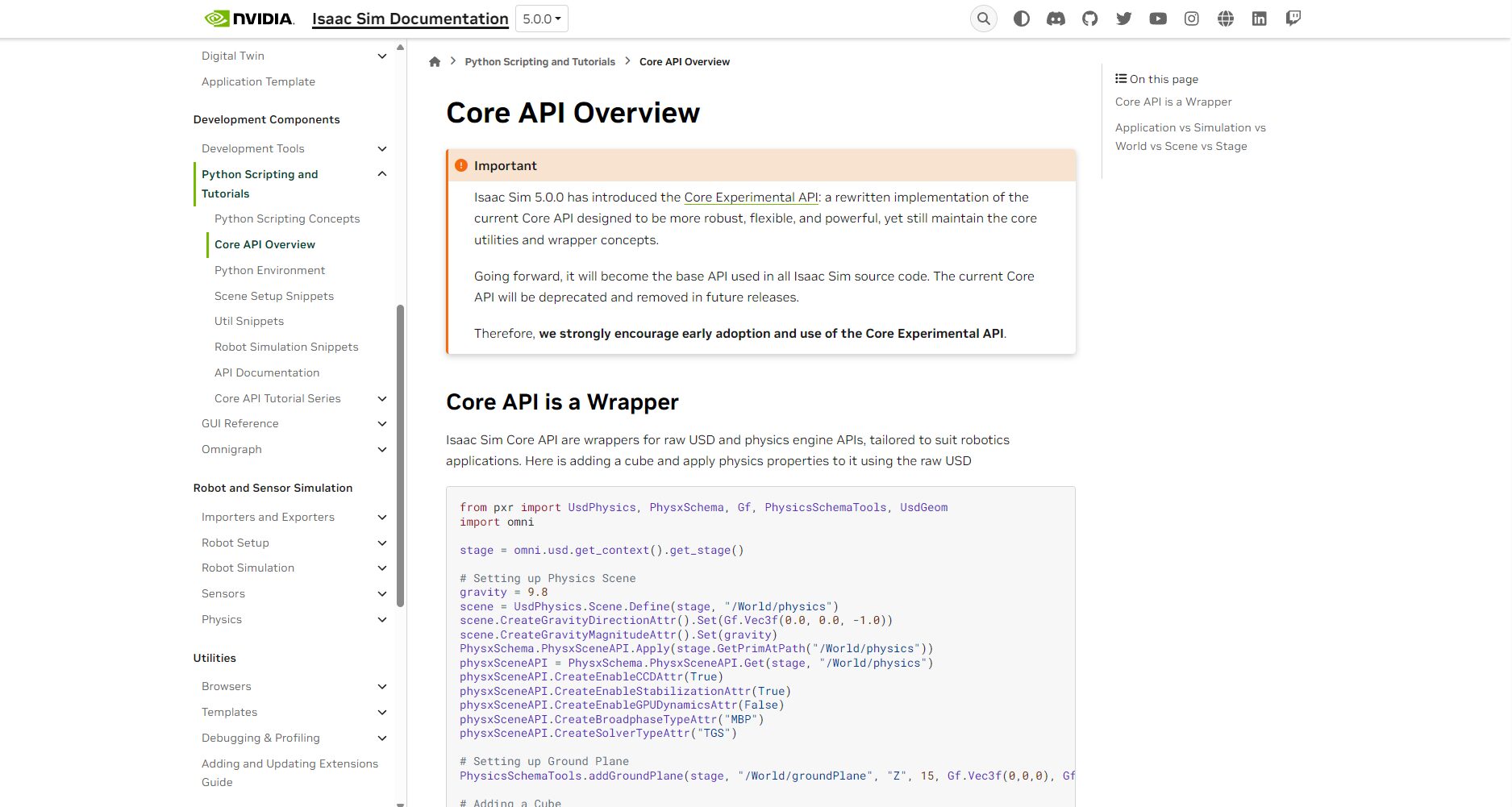
詳細開發文件請訪問 API文件
在這個AI與機器人高速創新的時代,isaac sim以「開放、真實、可擴展、AI友善」為標籤,驅動全球研發典範轉移。未來,越來越多開發者與公司透過isaac sim建構“數位機器人實驗室”,預見驅動現實、改變世界的AI機器人新紀元到來!
© 版權聲明
文章版權歸作者所有,未經允許請勿轉載。
相關文章


暫無評論...