
NVIDIA Isaac Sim正成为机器人与智能制造领域首选的物理仿真平台。其开源、多平台扩展、深度AI集成等优势,为研发团队带来高保真物理/视觉仿真、合成数据自动化与大规模测试能力。高度兼容ROS、支持主流模型和AI算法训练。2024年重大升级强化了批量仿真和云部署,推动智能机器人从设计到真实落地的全面革新。
一、Isaac Sim是什么?新闻视角下的AI仿真平台
Isaac Sim是NVIDIA基于Omniverse平台推出的高保真的三维机器人仿真环境,具备开源、开放生态、多物理引擎和AI集成等顶级能力。通过集成主流标准(USD、ROS/2、PhysX、RTX等),平台在学术界与工业界广获关注。
- 代码可定制,适合深度研发
- 物理与视觉高度还原真实世界
- 一站式合成数据,助力AI快速标注训练
二、核心功能亮点
| 功能模块 | 作用概述 | 领先技术 | 与AI关联 |
|---|---|---|---|
| 物理仿真 | 机器人与环境高度交互 | PhysX刚体/软体,电机驱动 | sim2real,端到端AI |
| 传感器仿真 | 相机、雷达等真实数据 | RTX渲染,传感器扰动建模 | 感知模型、数据自动化标注 |
| 合成数据 | 批量视觉/深度数据生成 | Omniverse Replicator | AI数据集扩充 |
| 机器人框架集成 | 支持ROS/2、URDF等 | 双向消息桥 | 易迁移挑战现实部署 |
| AI训练接口 | 强化学习与动作仿真 | Isaac Lab拓展,全面API | 一站式算法开发验证 |

高保真物理与视觉仿真由强大的PhysX和RTX加速渲染驱动,摩擦、碰撞等物理细节全面还原。例如,多关节机器人在复杂场景下的表现极为真实。
合成数据自动化通过Omniverse Replicator,一键生成RGB、深度、点云及全标签数据,极大提升AI模型的数据效率。
| 数据类型 | 支持情况 | 应用场景 |
|---|---|---|
| RGB图像 | 高精度标注、光照多样化 | 视觉检测/AI识别 |
| 深度图 | 真值对齐多摄像头 | SLAM、分割、3D重建 |
| 激光雷达点云 | 多线/扰动/运动模糊 | 导航、自动驾驶 |
| 分割标签 | 像素/实例多级分隔 | 监督/自动学习 |
深度集成机器人开发流程
支持现有ROS/2、URDF、MJCF等主流机器人设计标准。通过插件实现仿真-现实双向一致,流程灵活,沟通高效,既可用于实验室科研,也能快速部署到产业级项目。
三、架构与技术优势解析
1. 组件与数据流程
| 组件 | 功能简介 | 生态对接 |
|---|---|---|
| OpenUSD | 3D世界描述主流标准 | Pixar/Adobe/Apple等 |
| PhysX物理引擎 | 刚体、软体、摩擦、驱动 | 工程、工业、游戏等 |
| Replicator | 合成数据批量生成 | AI、视觉、无人驾驶 |
| ROS2/Isaac ROS | 机器人通讯消息同步 | 科研、产业多领域 |
| RTX渲染 | 实时高保真光追 | CV/AI仿真真实感 |
2. 三大主流操作模式
| 模式 | 入口 | 典型用户 | 优势 |
|---|---|---|---|
| GUI界面 | 桌面类App | 教育、验证工程师 | 可视化拖拽、快速建模 |
| EXT编程 | Python/C++模块 | 研发、开发者 | 动态扩展,热重载,定制性强 |
| HEADLESS脚本 | Jupyter/自动化 | 算法、数据生成 | 批量仿真,自动处理 |
四、行业应用与落地场景
1. 智能移动机器人
AMR、智能工厂、仓储机器人等,利用Isaac Sim实现复杂场景下的路径规划、避障和数据跟踪,高效验证与快速部署成为行业标杆。
- 工厂布局下多轮避障算法迭代,精准可复现
- 大规模仿真验证缩短开发与测试周期
2. 自动驾驶与智能感知
城市交通/室内环境多样仿真,可输出多模态传感器数据,助AI感知、检测、定位算法安全加速落地。
3. 人形机器人&机械臂
多自由度机械动作模拟、强化学习训练、力学验证全覆盖。适用于人形机器人步态优化、群体机器人协作、工业操控等。

4. 教育培训与创新教学
高校普及型自动化与机器人实践平台,丰富资产库和直观操作体系,为创新人才培养提供强力支撑。
五、isaac sim工作流程
1. 机器人模型导入
| 格式 | 特点 | 推荐场景 |
|---|---|---|
| URDF | ROS/2标准,结构规范 | 移动机器人/机械臂 |
| MJCF | 适合高自由度复杂设计 | 强化学习、物理研究 |
| OnShape | CAD直接建模导入 | 结构创新、工程设计 |
2. 场景&传感器配置
基于GUI或脚本拖拽,快速搭建三维场景,灵活添加障碍物、角色、各类相机激光雷达等。
3. 算法实时接入运行
支持将本地AI/感知/控制算法“即插即用”接入仿真,实时观测并调整AI决策链路效果。
4. 批量测试与数据归档
云端或本地多GPU大规模仿真实验,自动归档所有场景与运行结果,为不断优化AI及硬件提供强数据支撑。
六、与AI研发全流程的深度适配
Isaac Sim已成为AI机器人开发的“仿真优先基地”:从自动化生成大量合成训练数据,到深度强化学习平台,再到软硬件一体闭环,极大降低研发门槛和部署风险。
- 大模型数据加持:Sim结合Cosmos/GR00T等AI模型扩充数据多样性和泛化力
- 全环节安全闭环:端到端“仿真-实物”验证,保障工业/无人驾驶安全标准
- 主流AI框架直通:无需复杂适配,算法灵活验证、一键迁移落地
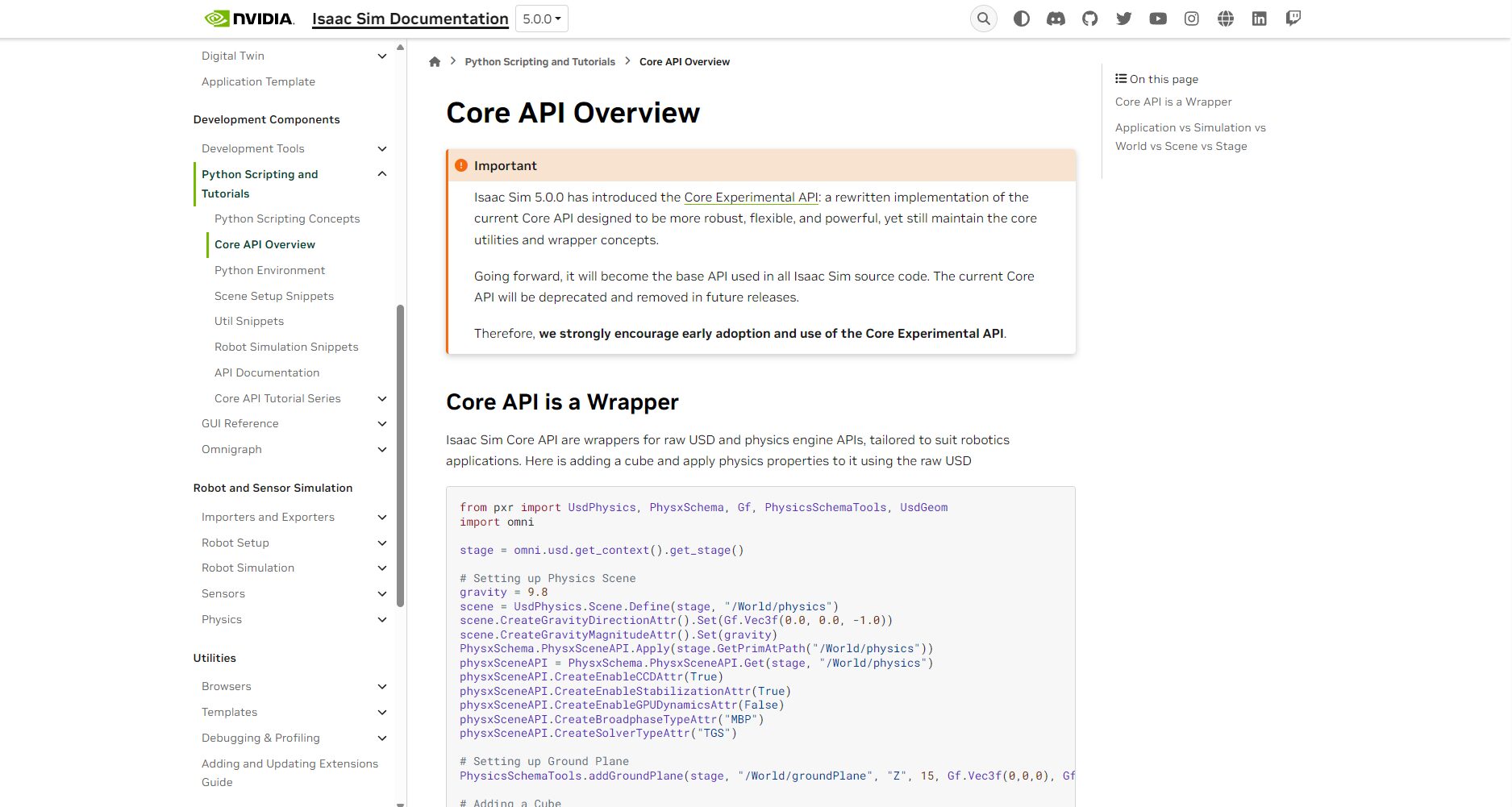
详细开发文档请访问 API文档
在这个AI与机器人高速创新的时代,isaac sim以“开放、真实、可扩展、AI友好”为标签,驱动全球研发范式变革。未来,越来越多开发者与公司通过isaac sim构建“数字机器人实验室”,预见驱动现实和改变世界的AI机器人新纪元到来!
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...